The Virtual Football Trainer
Internal Skeleton
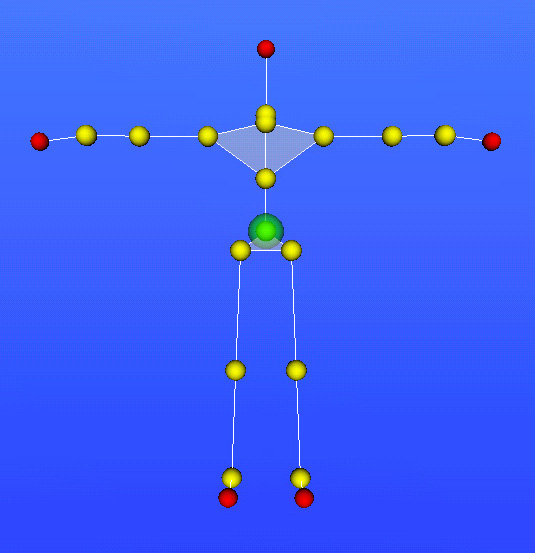
The animated movement of a virtual player is controlled via an internal skeleton, a hierarchical structure of joints and links derived from human anatomy. The links are assumed to be rigid elements corresponding to the bones. The joints (yellow spheres in the images below) are the connecting points between the links and act like ball-and-socket connectors that allow for rotation at each joint.
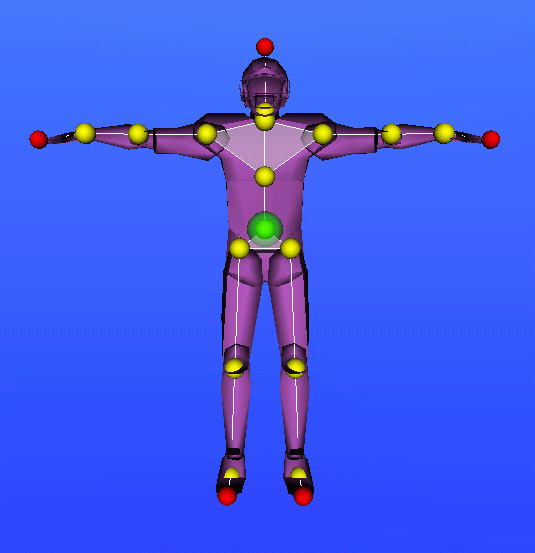
The skeleton is enveloped by a three-dimensional geometric shell that represents the player's external shape. This geometry is divided into segments with each segment corresponding to a specific link of the skeleton. A segment is always in a fixed relation to its corresponding link, i.e., if the orientation of a link changes, so does the corresponding segment.
Ultimately, only the external geometry is rendered. The skeleton is never displayed, but is numerically embedded in the algorithm that controls the animation.
Skeleton with joints and links (left) and superimposed geometry envelop (right)
Most joints have three degrees of freedom (rotation about the x, y, and z axis, respectively). The challenge of a realistic animation is to determine the change of these angles on a dense time grid for all joints of the skeleton. With all 22 players on the field and each player moving differently, a total of about 1,200 degrees of freedom need to be controlled simultaneously for the duration of an animated play.
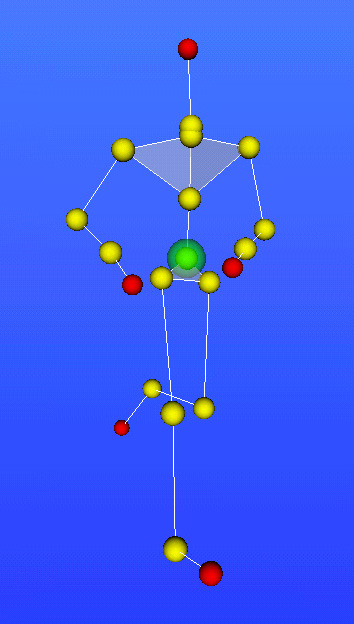
Full size (66K) -- Load VRML
Skeleton snapshot from the animation of a running player
Last update: January 5, 2003, kpb
Return to The Virtual Football Trainer